机器人智能:在冰冷的机器中注入灵魂
1.双摆臂履带机器人

我们研究如何设计一个双摆臂履带机器人,使其能够在各类不平整地形中实现精确稳定的控制。例如:机器人能够在崎岖山地、泥泞斜坡或废墟碎片等复杂环境中自主导航以绕过障碍;利用双臂协调运动在颠簸路面上行动;实时分析地形变化并自适应调整履带运动, 使机器人具备翻越一定高度的能力和具备维持自身姿态稳定的能力。
2.人机交互控制

我们希望设计更加自然的人机控制方式来实现机器人的控制。这些控制方式既包括传统的按键控制、文本控制、手势控制等,还包括更加新型和富有挑战性的语音控制和脑电控制等。此外,我们还设计了一套包容式多场景控制系统对各类控制方式进行整合,使机器人能够有条理地理解用户各种控制信号,并具有控制通道扩展的能力。
3.导航和定位
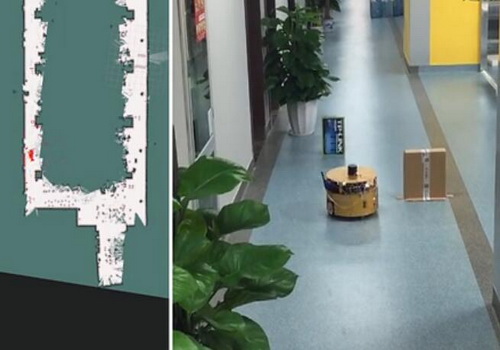
在机器人系统中 ,自主导航是一项核心技术 , 是机器人研究领域的重点和难点问题。导航的基本任务有 3 点: ( 1)基于环境理解的全局定位: 通过环境中景物的理解 ,识别人为路标或具体的实物 ,以完成对机器人的定位 ,为路径规划提供素材;( 2)目标识别和障碍物检测: 实时对障碍物或特定目标进行检测和识别 ,提高控制系统的稳定性; ( 3)安全保护: 能对机器人工作环境中出现的障碍和移动物体作出分析并避免对机器人造成的损伤。而在自主移动机器人导航中 , 无论是局部实时避障还是全局规划, 都需要精确知道机器人或障碍物的当前状态及位置, 以完成导航 、避障及路径规划等任务,这就是机器人的定位问题。
4.机器人学习算法
我们关心如何让机器人能够像人一样思考,使其具备一套自主开放式的学习系统。我们假想刚设计好的机器人就像是一个婴儿一样,我们希望他能够通过自主地观察和人类有监督的教导来逐渐感知和认知世界,变得越来越聪明。并且,我们还希望机器人在感知世界的同时能够综合利用自身多项传感器,通过感官之间的联想记忆对各种传感器数据进行融合,从而形成对环境中事物的全方位理解,获取事物的概念,并最终形成决策。